2.无人驾驶行业的现状分析
2.1 车载传感器一览
无人车使用的传感器,大的来说有以下这些类别:激光雷达,摄像头,GPS(包括差分GPS),IMU(惯性制导),毫米波雷达,超声波雷达等等。
虽然人类可以只通过视觉和听觉就实现驾驶,但是机器人缺乏能够有效识别场景的大脑,需要通过更强的“五感”,来弥补这个缺陷。传感器,可以说是无人驾驶汽车的眼睛和耳朵。
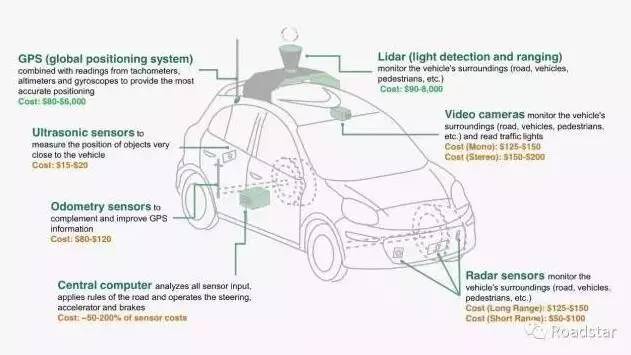
(图:车载传感器的案例)
2.2 主要传感器之LiDAR
而现在不同传感器类别中,源自于DARPA的激光雷达(LiDAR),被认为是无人驾驶最重要也是最必不可缺少的传感器。相比起其他传感器,他最大的优势在于对于空间的测量非常精确,可以保证相对高的安全系数。

(图:传感器的优劣势对比)
目前全球的LiDAR供应几乎被Velodyne垄断。价格昂贵,最便宜的16线7,900美金,最贵的64线80,000美金一台。
机械式激光雷达通过高速旋转,能够通过点云形成对周边空间环境的准确感知,各家无人驾驶厂商需要开发自己的点云特征识别技术。
2.3 LiDAR开发的激烈竞争
目前全球范围内,技术比较成熟的厂商还只有源自DARPA的Velodyne一家。但是也有数不尽的初创公司诞生,试图挑战Velodyne的垄断地位。
而LiDAR本身,也有一个最新的技术方向,就是摒弃Velodyne的机械旋转设计,用相控阵技术实现固态的激光雷达。固态的激光雷达虽然最高线数只能到达16线。但是更易量产,成本也可以做得更低。被普遍认为是激光雷达的究极解决方案。最终的成本,可以降到100美金一个,和摄像头相仿。
2.4 只采用摄像头是否靠谱—DeepLearning的能力边界在哪里
今年由于DNN(DeepNeuralNetwork),也就是深度学习技术的进步,有很多基于此的新算法诞生。很多学者说仅仅依靠DNN技术,就可以实现类似人类的驾驶—只依靠摄像头的视觉信息,实现Level4级别的无人驾驶。
其代表,就是来自于Princeton大学AI领域的教授肖建雄创立的AutoX,和来自于斯坦福大学AILab,著名AI三驾马车吴恩达太太创立的Drive.ai。
然而,也许是发现只依靠视觉信息和DNN无法实现Level4要求的安全性,加上摄像头单一传感器的局限性,这两家企业目前都已经改变了当初宣称的做法。
AutoX说他们是“CameraFirst”,未来LiDAR降价后会加上LiDAR。而Drive.ai说他们在使用DNN算法来识别LiDAR产生的点云—而不是仅仅用在摄像头上。
从我们的角度看来,因为LiDAR降价是个必然到来的事情,因为价格高昂而不用LiDAR,降低系统整体的安全性与可靠性,可能得不偿失。
 如发现本站文章存在版权问题,烦请联系editor@askci.com我们将及时沟通与处理。
如发现本站文章存在版权问题,烦请联系editor@askci.com我们将及时沟通与处理。


 中商产业研究院:《2020年中国加氢站行业市场前景及投资研究报告》发布
中商产业研究院:《2020年中国加氢站行业市场前景及投资研究报告》发布
 锤子科技CEO罗永浩跨界电商直播 一文看懂我国电商直播发展如何?
锤子科技CEO罗永浩跨界电商直播 一文看懂我国电商直播发展如何?
 中商产业研究院:《2020年中国MCN行业市场前景及投资研究报告》发布
中商产业研究院:《2020年中国MCN行业市场前景及投资研究报告》发布
 2020年1-2月全国汽油产量为2044万吨 同比下降13.9%
2020年1-2月全国发电量同比下降8.2%
2020年1-2月全国集成电路产量为296.3亿块 同比增长8.5%
2020年受疫情影响较大的行业分析系列之三——旅游行业篇(图)
2020年1-2月全国光缆产量统计数据分析
2020年1-2月全国发动机产量同比下降38.8%(图)
2020年1-2月全国十种有色金属产量为935.4万吨 同比增长2.2%
2020年1-2月全国汽油产量为2044万吨 同比下降13.9%
2020年1-2月全国发电量同比下降8.2%
2020年1-2月全国集成电路产量为296.3亿块 同比增长8.5%
2020年受疫情影响较大的行业分析系列之三——旅游行业篇(图)
2020年1-2月全国光缆产量统计数据分析
2020年1-2月全国发动机产量同比下降38.8%(图)
2020年1-2月全国十种有色金属产量为935.4万吨 同比增长2.2%